■事業の思想と展開
★事業の基本スタンス
スタンス1:「みんなの道路社会資本維持」は「全住民参加で推進」する。
・・・・2:車の基本動作「走る・曲がる・止まる」を「支えるのは,静摩擦係数」が一役をなす。
・・・・3:「革新的維持管理手法」は路面性能の「滑らず・平ら」と「舗装構造の健全度」であり,自主研究開発は略・完了した。
・・・・4:今後は,その成果を「周知・普及活動に特化」と「営業活動」をして早期の実用を目指す。
・・・・5:推進対象は「地方自治体」から展開したい。
★★近未来社会予測と適切な管理手法:(滑らず・平らな)(健全度)
| 1.高齢社会→誤操作→サポカー→自動運転⇒滑らない路面→静摩擦係数:「滑らず」 |
| 2.環境保全→住民苦情→交通振動(65db>)⇒路面の平坦度:「平らな」 |
| 3.資産保全→地方財政難→合理的・経済的・有用⇒「構造的健全度予測」 |
★★★国の動向
H29年度に舗装点検要領の改訂(国道管理に適用)
(1) 3年毎・目視による①クラック②わだち掘れ量③IRIが決まる
(2) クラック率から構造的健全度を予測して詳細調査・判定・修繕する。
しかし,問題・課題が残る。其れは:
① IRIは,「縦断方向の凹凸量で,視覚の苦手」分野で目視調査では無理である。
② クラック率からの「健全度判定は精度が悪く」*1)難しい。
③ 従来の詳細調査は「膨大な費用と時間」がかかる。
*1):久保和幸、渡邉一弘、綾部孝之:10.4 舗装の管理目標設定手法に関する研究、土木研究所報告書
★-4 課題の対処:
そこで「簡便な機械計測」のSystemを開発した。
(1) 開発仕様
簡便に①IRI②クラック③わだち④すべり,の4路面要素が調査できる車両と解析処理機を開発した。
車両前方に②のデジカメを後方に③のレーザースキャナーを取り付ける。
②・③は目視でも良い。
★-5 運用のモデル:三位一体型のモデル
利用者・住民から情報提供を受け現況を把握する。

★-6 課題の対処:
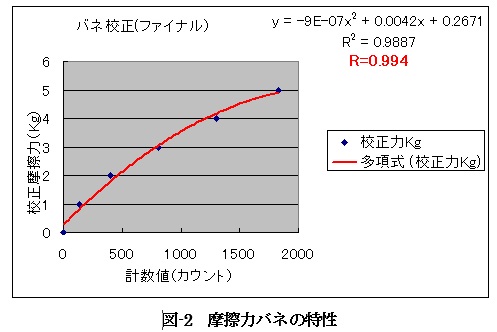
(1)すべりの校正(検量線) μ=摩擦力/荷重にて算出
① IRI:逐次2角法を用いたわだち部の縦断形状が収集⇒専用ソフト
② クラック:デジタルカメラで25m毎に撮像⇒AIでクラック率算出
③ わだち:TF型の高速スキャニング⇒専用ソフト
④ すべり:自己摩擦力生成型「静摩擦係数測定器」⇒専用ソフト
(2)特記:
H29年度「舗装点検要領書を準拠」している。
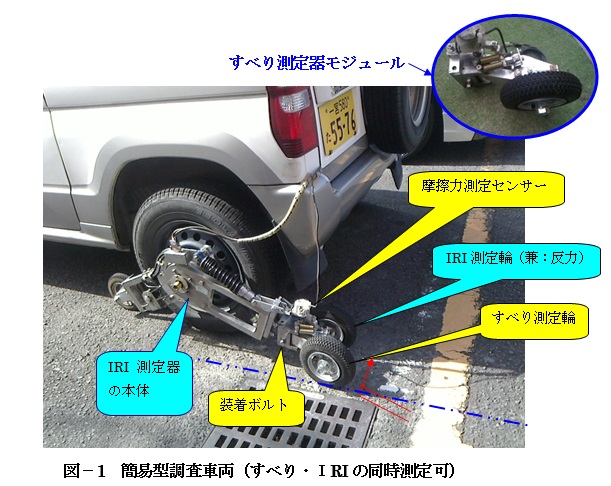
(3)開発装置:一度の走行で「滑らず・平ら」と「健全度」が判る。
舗装の点検要領項目のIRI調査機械に装着した例です。
路面性状の2要素(①IRI・④すべり)を同時に測れる装置です。
すべり測定輪を5度トウインにセッティングされている為,走行に伴い内側に移動する。此れに対抗するバネには,摩擦力が溜まる仕組みである。
「蓄積摩擦力>路面静摩擦力」の時,路面とタイヤの間で滑り発生,此れがμ計測を可能にする基本原理である。
(4)その他,②クラック③わだちについて
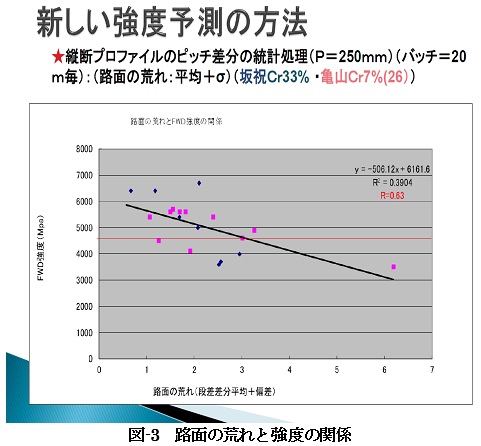
(5)舗装体の強度予測:
IRI調査の原資縦断プロファイルから統計処理して求めた「路面の荒れ」とFWD調査結果の関係から舗装体の強度を予測する方法を見出した。
★-7 まとめ:
今後,地方自治体の財政は厳しくなると想定できる。住民の血税を有効に活用する時期が来た。従来手法に拘る理由は無い。地方自治体が自由な方法で管理する時代が来た。
2k200825
文責: 福原 敏彦